The Randall Museum in San Francisco hosts a large HO-scale model railroad. Created by the Golden Gate Model Railroad Club starting in 1961, the layout was donated to the Museum in 2015. Since then I have started automatizing trains running on the layout. I am also the model railroad maintainer. This blog describes various updates on the Randall Museum Model Railroad and I maintain a separate tech blog for all my electronics & software not directly related to Randall.
Orion finished the replacement of the T324 turnout that connects the Mainline to the Branchline.


Read this page for all the details and more pictures: 2024-08-21 - Randall Repairs: Turnout T324 on Branchline
The Randall Museum Halloween 2024 event was this Saturday (the museum always does it a bit in advance). Our train operators ran a number of Halloween-themed trains. They dimmed the room lights, for a great ambience:
(photos courtesy of Orion) |
|
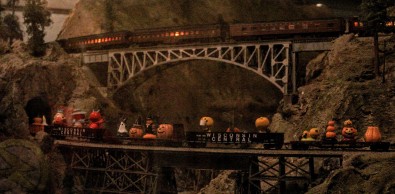




They ran 2 Halloween trains with very nice little figurines on the wagons:


Affected |
Turnout T324 (Branchline Angel Camps junction to Mainline). |
Description |
Broken switch rod and points. |
Summary Fix |
Fixed: Replace the turnout. |
Description of Issue
The dual-gauge turnout has two minor issues.

The switch rod broke in 2 parts, and the points are no longer attached to the switch rod anyway. Other than that, it’s awesome. In other words, it’s absolutely unusable as a switch.
I typically do not hesitate to “condemn” turnouts to sidings we never use; however this one is the junction between the mainline and the branchline, and we very much want that to keep working.
Click here to continue reading...
I made a quick attempt at placing Thomas on the (failing) Trolley Automation.

That did not work very long… Thomas worked well there. But like the other trolley units, it had the same problem: as soon as it would stop on the resting point, it would lose conductivity overnight and would not be able to work the next day.
I think there’s something essentially wrong with the track at the end of that spur.

Eventually I will check with Orion about simply changing the rails. There’s not a ton of scenery and almost no ballast there, and it’s easy to access. My first suggestion would be changing the track for something more modern and with better conductivity.
I would also really like to go back to my initial orange trolley with the characteristic sounds and lights. That engine has a LokSound DCC decoder that works fine on the bench, but it fails to reply to start or stop commands “after a while”. And that’s on top of the track becoming a dead spot overnight. I have a few spare decoders I can use for that.
Orion got a dummy Caltrain EMD F40PH. It has a spectacularly primitive “build quality” to it, however it perfectly represents the kind of trains that used to run here in the Bay Area. I opened the engine and added enough weights to it to make it usable, then added that to the Amtrak Branchline Automation train.
I think it’s a good fit:


On the Branchline, block B860 is the YouBet station, and block is a very loooong single block where the branchline loops behind the scenery in the back. With Orion, we added a toggle to be able to turn this part on and off easily:
This allows us to turn this off when we’re not using: if for some reason the Branchline automation train does not strop, I want it to end up “dead” on that spot rather than continue all the way back to the SIA or the Stockton Station.


The turnout T324 on the branchline has multiple issues.
One of them is that clearly the contacts on the Circuitron Tortoise Slow-Motion Switch Machine do not work as expected.
So what’s inside a Tortoise?
It turns out that it’s quite easy to open once you figure that the screws are “hidden” under the label. No need to force the plastic as I unfortunately started doing first.

I guess the warranty is void now… What warranty anyway? That switch machine is likely 10 years old or more -- every single Tortoise on the Randall Model Train Railroad was installed by the GGMRC members and thus that had to be before 2015. According to the “recent changes” on the Tortoise page, the tan color of the circuit board indicates a unit built before 2019.
The auxiliary contacts are simply printed on a small motherboard on the side:

Originally I wrote this off entirely, but now that I see that, I’m thinking a bit of CRC-226 on these contacts is probably all it needs to restore it to pristine condition.
Here’s a small side project I’ve been working on for the last month on-and-off and I finally deployed the first prototype of it this morning.
One of the key issues we have on the layout is that we can park trains on the Napa and Richmond yards, and enter the mainline via turnout T150 - yet that is located on the other side of the mountain, out of view of operators who typically stand on the other side of the layout at the Stockton Yard.

Thus the goal of this new project is to give the Saturday Operators, who are located at the Stockton Yard, an easy way to view trains in the back of the layout, with a focus on the lower tracks where the mainline branches off to the Napa and Richmond yards.
To that end, I’ve added 2 cameras in the back of the layout, pointed at the track:

These cameras provide a video feed on the internal layout wifi which is then picked up by a new tablet display next to the Stockton Panel:
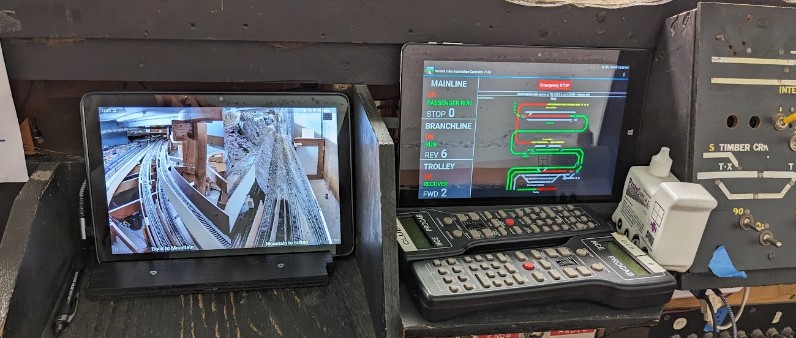
The tablet runs a special custom software that I wrote. It takes the video feed from both cameras and displays it side by side:
Click here to continue reading...
Affected |
Turnout T830 (Branchline after Angel Camps). |
Description |
Derailment due to gap, point not closing properly. |
Summary Fix |
Spiked in-place |
Started |
2024-07-29 |
Status |
Temporarily fixed. Turnout is still not functional. |
Description of Issue
The branchline Amtrak train is a back-and-forth shuttle. It has been derailing in a rather unusual way lately on its way back to the station:

That’s a pretty unusual situation. The issue is not with the turnout as seen above, but the previous/following on at T830.
The branchline features complex dual-gauge turnout, being both standard gauge and narrow gauge. The single track splits into a siding at turnout T830 when arriving at Angel Camp. However the curved closure rail has been broken and missing on that particular turnout at least since 2015, even if not more -- which means the turnout is essentially unusable.
Screenshot of a 2015 cab ride video showing the broken point on T830.

Back in 2019, the throwbar on this turnout started shifting, and the gap was opening in the top switch rail -- engines or cars were derailing as they were mistakenly trying to take the diverging direction. I addressed that in 2019 by spiking the turnout throwbar. Apparently the issue started appearing again:
Click here to continue reading...
2024-07-29 - Branchline Power
Category RandallOrion and I are finalizing a project I had started in 2019: repower the entirety of the branchline and, more importantly, address the polarity reverser issue.
The branchline on the Randall layout essentially acts as a very long reverse loop and can be conceptualized as being composed of 3 parts:
- The most visible part of the Brancheline is the mountain section -- the branchline connects to the mainline at Sonora via turnouts T322 and T324. This part then goes through Angel Camp (B820), the Canyon (B830), and on the other side of the mountain onto Smith Flat (B840) and finally You Bet (B860). All this part of the Branchline is dual gauge.
- The second part of the branchline is the part most people don’t get to see as it serpentines through the unscenicked back of the layout. Of note, this section contains a small coal yard, which I understand was designed by Mr. Perry. On my track map, I designate this B870 up to B890.
- The third part of the branchline is where the end of B890 meets again the mainline just after the Stockton Station at what is called the “Rodgers’ Junction”.
Up to now, the entirety of the branchline was connected to the DCC power by a Lenz LK100 polarity reverser. Since the branchline is, by design, a reverse loop, it does make sense to have a polarity reverse. However that does not justify powering the entire route via the polarity reverser -- the issue is that polarity reversers work by detecting shorts, so essentially anything that shorts the branchline, anywhere on it, triggers the polarity reverser to try to “fix” the polarity.
A better design would be to rewire the branchline such that the dual-gauge section matches the polarity of the mainline at Sonora, that the B890 block at Rodgers matches the mainline at Rodgers, and some or all of the middle part be the polarity reverser section.
So that’s what Orion and I are attempting to finish. We’re partly done, yet some notable progress has been made.
First, the polarity reverse is gone from the source DCC bus:
|
|
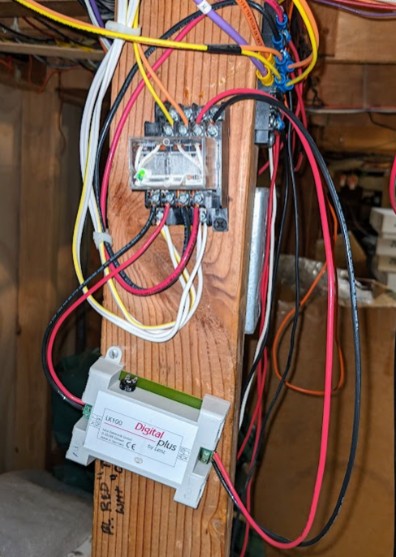
Explanation of the wiring above:
Click here to continue reading...